(Noticias de Nanwerk) Los ciempiés son conocidos por su andar tambaleante. Con decenas a cientos de patas, pueden atravesar cualquier terreno sin detenerse.
«Cuando ves un ciempiés al galope, esencialmente estás viendo un animal que vive en un mundo muy diferente al nuestro», dijo Daniel Goldman, profesor de la familia Den en la Escuela de Física. “Nuestro movimiento está dominado en gran medida por la inercia. Si balanceo la pierna, me pongo de pie y sigo adelante. Pero en el mundo de los ciempiés, si dejan de sacudir las partes del cuerpo y las extremidades, dejan de moverse de inmediato”.
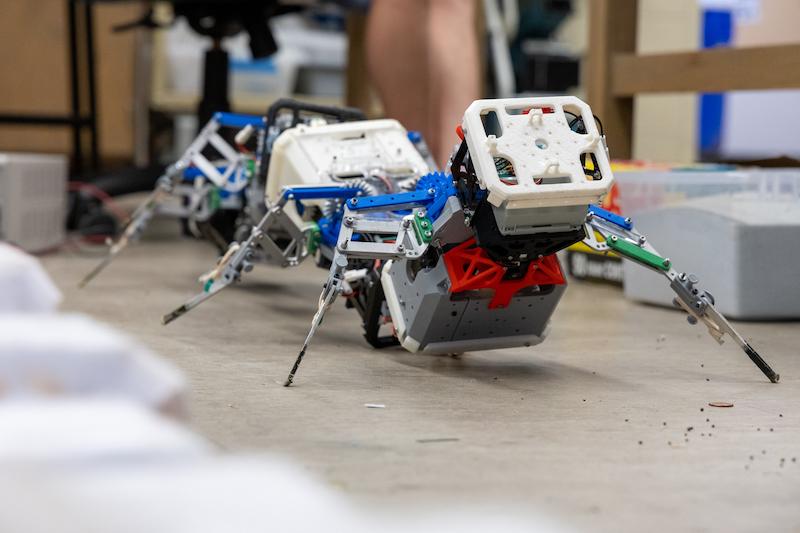
Intrigados por ver si las extremidades múltiples podrían ser útiles para navegar por este mundo, un equipo de físicos, ingenieros y matemáticos de Georgia Tech están utilizando este modo de locomoción para su beneficio. Desarrollaron una nueva teoría de locomoción de múltiples patas y crearon modelos robóticos de múltiples patas, descubriendo que un robot con patas adicionales podría moverse a través de superficies irregulares sin ninguna tecnología adicional de detección o control como predice la teoría.
Estos robots pueden moverse sobre terrenos complejos y accidentados, y existe potencial para su uso en agricultura, exploración espacial e incluso búsqueda y rescate.
Los investigadores presentaron su trabajo en artículos en Ciencias (Transferencia de material multifacético: un marco para navegar por un paisaje bullicioso.) y en procedimientos de la Academia Nacional de Ciencias (Autopropulsión por deslizamiento: Natación por fricción en locomotoras multibrazo.).
pierna
a mi Ciencias Sobre el papel, los investigadores estaban motivados por la teoría de la comunicación del matemático Claude Shannon, que muestra cómo las señales se pueden transmitir de manera confiable a distancia, para comprender por qué un robot múltiple tiene tanto éxito en la locomoción. La teoría de la comunicación sugiere que una forma de garantizar que un mensaje llegue del punto A al punto B en una línea ruidosa no es transmitirlo como una señal analógica, sino dividirlo en unidades digitales discretas y repetir estas unidades en un código apropiado.
«Esta teoría nos inspiró y tratamos de ver si la repetición es útil para mover la materia», dijo Baxi Chong, investigador postdoctoral en física. «Entonces, comenzamos este proyecto para ver qué pasaría si tuviéramos más patas en el robot: cuatro, seis, ocho patas, incluso 16 pies».
Un equipo dirigido por Chung, incluido el becario postdoctoral en la Escuela de Matemáticas Daniel Irvin y el profesor Greg Blackerman, desarrolló una teoría que sugiere que agregar pares de piernas a un robot aumenta su capacidad para moverse con fuerza sobre superficies difíciles, un concepto que llaman redundancia espacial. Esta redundancia hace que las piernas del robot trabajen por sí solas sin necesidad de sensores para interpretar el entorno. Si una pierna tropieza, la plétora de piernas la mantiene en movimiento a pesar de todo. En efecto, el robot se convierte en un sistema confiable para transportarse a sí mismo e incluso la carga útil de A a B en paisajes difíciles o «ruidosos». El concepto es similar a cómo se garantiza la puntualidad en el transporte sobre ruedas si la vía o el riel son lo suficientemente suaves pero sin la necesidad de diseñar el entorno para crear esa puntualidad.
“Con un robot bípedo avanzado, generalmente se requieren muchos sensores para controlarlo en tiempo real”, dijo Chung. Pero en aplicaciones como búsqueda y rescate, exploración de Marte o incluso micro-robots, existe la necesidad de conducir un robot con capacidad de detección limitada. Hay muchas razones para una iniciativa sin sensores. Los sensores pueden ser costosos y frágiles, o los entornos pueden cambiar demasiado rápido para permitir suficiente tiempo de respuesta para el controlador del sensor”.
Para probar esto, Juntao He, Ph.D. Como estudiante de robótica, realizó una serie de experimentos en los que él y Daniel Soto, estudiante de maestría en la Escuela de Ingeniería Mecánica George W. Woodruff, construyeron un terreno para imitar un entorno natural inconsistente. Luego probó el robot aumentando el número de patas de dos en dos, comenzando con seis y luego ampliándolo a 16. Con el aumento del número de patas, el robot podía moverse con mayor flexibilidad por el terreno, incluso sin sensores, ya que el teoría predicha. Al final, probaron el robot al aire libre en tierra real, donde pudo atravesar una variedad de entornos.
«Es realmente impresionante presenciar la eficiencia de un robot de varias patas al navegar tanto en terrenos de laboratorio como en entornos al aire libre», dijo Juntao. “Mientras que los robots bípedos y de cuatro patas dependen en gran medida de los sensores para atravesar terrenos complejos, nuestro robot de varias patas utiliza la redundancia en las patas y puede realizar tareas similares con un control de circuito abierto”.
próximos pasos
Los investigadores ya están aplicando sus hallazgos a la agricultura. Goldman cofundó una empresa que aspira a utilizar estos robots para eliminar las malas hierbas de las tierras de cultivo donde los herbicidas son ineficaces.
«Es como un Roomba pero está fuera del territorio complejo», dijo Goldman. «Un Roomba funciona porque tiene ruedas que funcionan bien en terreno llano. Hasta que desarrollamos nuestro marco, no podíamos predecir de manera confiable la cinemática sobre terreno accidentado, rocoso y lleno de escombros. Ahora tenemos los comienzos de un esquema de este tipo, que puede ser utilizados para garantizar que nuestros robots crucen el campo.” cultivos en un período de tiempo determinado.
Los investigadores también quieren mejorar el robot. Saben por qué funciona el marco de un robot ciempiés, pero ahora han determinado el número óptimo de patas para lograr la subdetección del movimiento de una manera que es rentable y aún conserva los beneficios.
En este documento, preguntamos: «¿Cómo espera que la cantidad mínima de patas logre tales tareas?», Dijo Chung. «Actualmente, solo probamos que hay un número mínimo, pero no sabemos exactamente cuántas patas se requieren. Además, necesitamos comprender mejor el equilibrio entre energía, velocidad, fuerza y durabilidad en un complejo tan complejo». sistema.»
